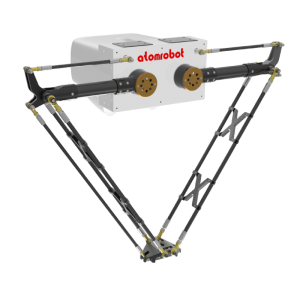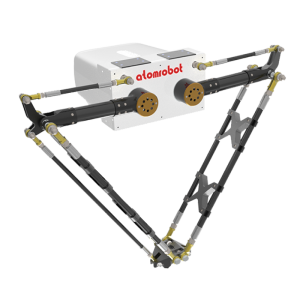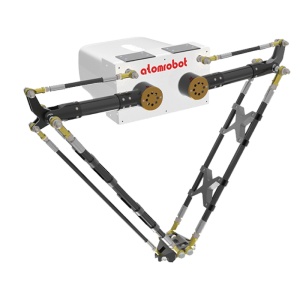
Robot Delta DD2-1000-P30
Producto característico
Característica
1. El tiempo de ciclo estándar es inferior a 0,75 s, lo que permite alcanzar la máxima velocidad y carga máxima.
2. El diseño avanzado del mecanismo paralelo plano doble hace que el robot obtenga movimientos de alta velocidad a bajo costo.
3. El robot es ideal para la producción de alta velocidad en la industria alimentaria y medicinal.Ampliamente utilizado en montaje, manipulación y recogida y colocación de materiales pequeños.
Parametros del producto
| Tipo | DD2-1000-P30 | |
| ejes | 2 | |
| Carga útil | 30kg | |
| Manipulador | Peso | 60kg |
| Diámetro | 1000 mm | |
| Repetibilidad | Posición | 0,05 mm |
| Rotación | - - - | |
| Máxima velocidad | 250 páginas/min | |
| Rango de rotación | - - - | |
| Momento de inercia máximo permitido | - - - | |
| Rango de ángulo del brazo accionado | Arriba | 25º |
| Abajo | 77º | |
| Fuente de alimentación | Trifásico 380VAC -10%~+10%, 49~61HZ | |
| Capacidad de potencia | 10KVA | |
| Potencia nominal | 6kw | |
| Temperatura de almacenamiento | -10 ℃ ~ 70 ℃ | |
| Ambiente de trabajo | -10℃~50℃, HR≤80% | |
| Proteccion | IP55 | |
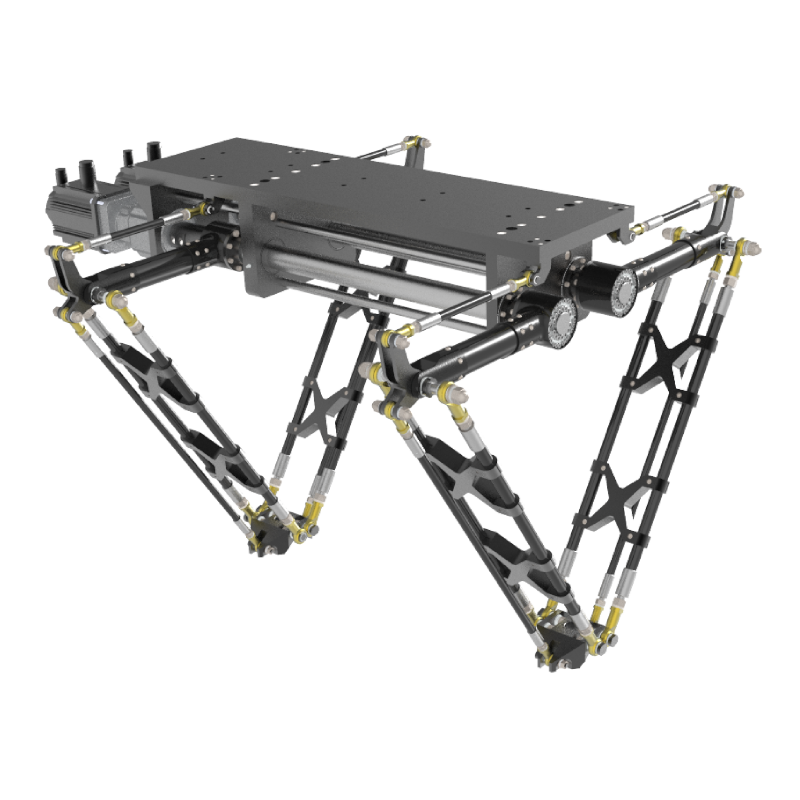
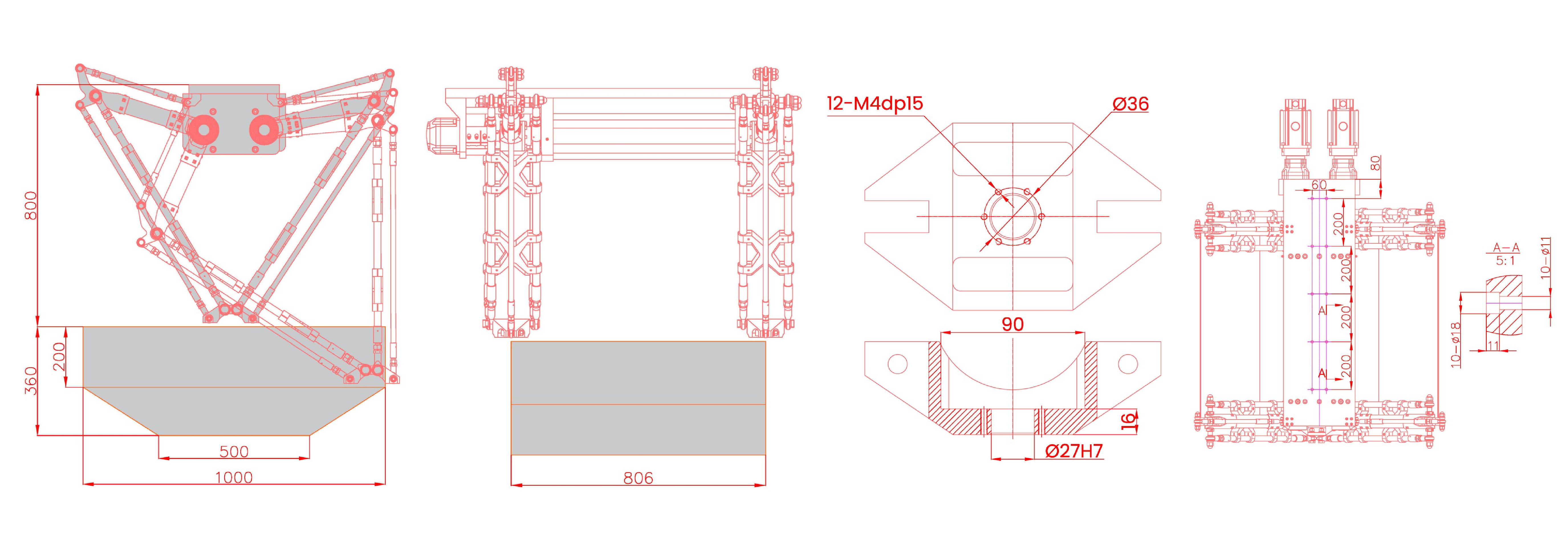
Dibujo del producto
Escribe aquí tu mensaje y envíanoslo