Robot Delta D3PM-1600-P3
Producto característico
Característica
1. El tiempo de ciclo estándar es inferior a 0,4 s, lo que satisface su búsqueda de alta velocidad y volumen mínimo.
2. El diseño avanzado del motor rotacional en la plataforma móvil permite que el robot alcance fácilmente una alta precisión de rotación.
3. El robot es ideal para operaciones en espacios reducidos, así como para alta velocidad y alta precisión en el campo 3C.Ampliamente utilizado en montaje, manipulación y prueba de piezas de trabajo pequeñas.
Parametros del producto
| Tipo | D3PM-1600-P3 | |
| ejes | 3+1 | |
| Carga útil | 3 kilos | |
| Manipulador | Peso | 79,7 kilos |
| Diámetro | 1600 mm | |
| Repetibilidad | Posición | 0,05 mm |
| Rotación | 0,05° | |
| Máxima velocidad | 400 páginas/min | |
| Rango de rotación | ±360 | |
| Momento de inercia máximo permitido | 31×10-4kg.m2 | |
| Rango de ángulo del brazo accionado | Arriba | 22º |
| Abajo | 76º | |
| Fuente de alimentación | Trifásico 380VAC -10%~+10%, 49~61HZ | |
| Capacidad de potencia | 10KVA | |
| Potencia nominal | 6,1 kw | |
| Temperatura de almacenamiento | -10 ℃ ~ 70 ℃ | |
| Ambiente de trabajo | -10℃~50℃, HR≤80% | |
| Proteccion | IP55 | |
Dibujo del producto
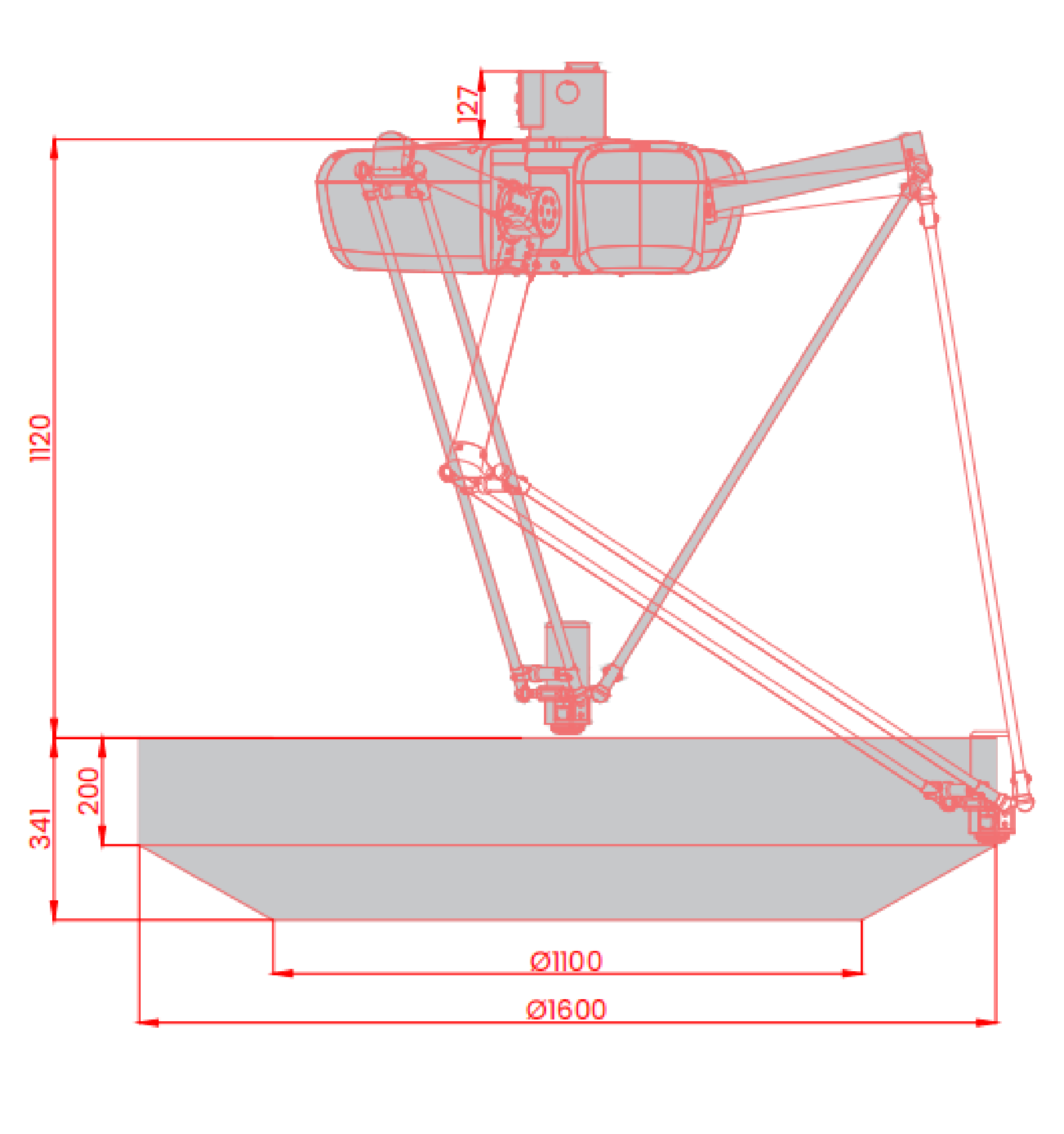
01.Dimensiones y rango de trabajo (mm)
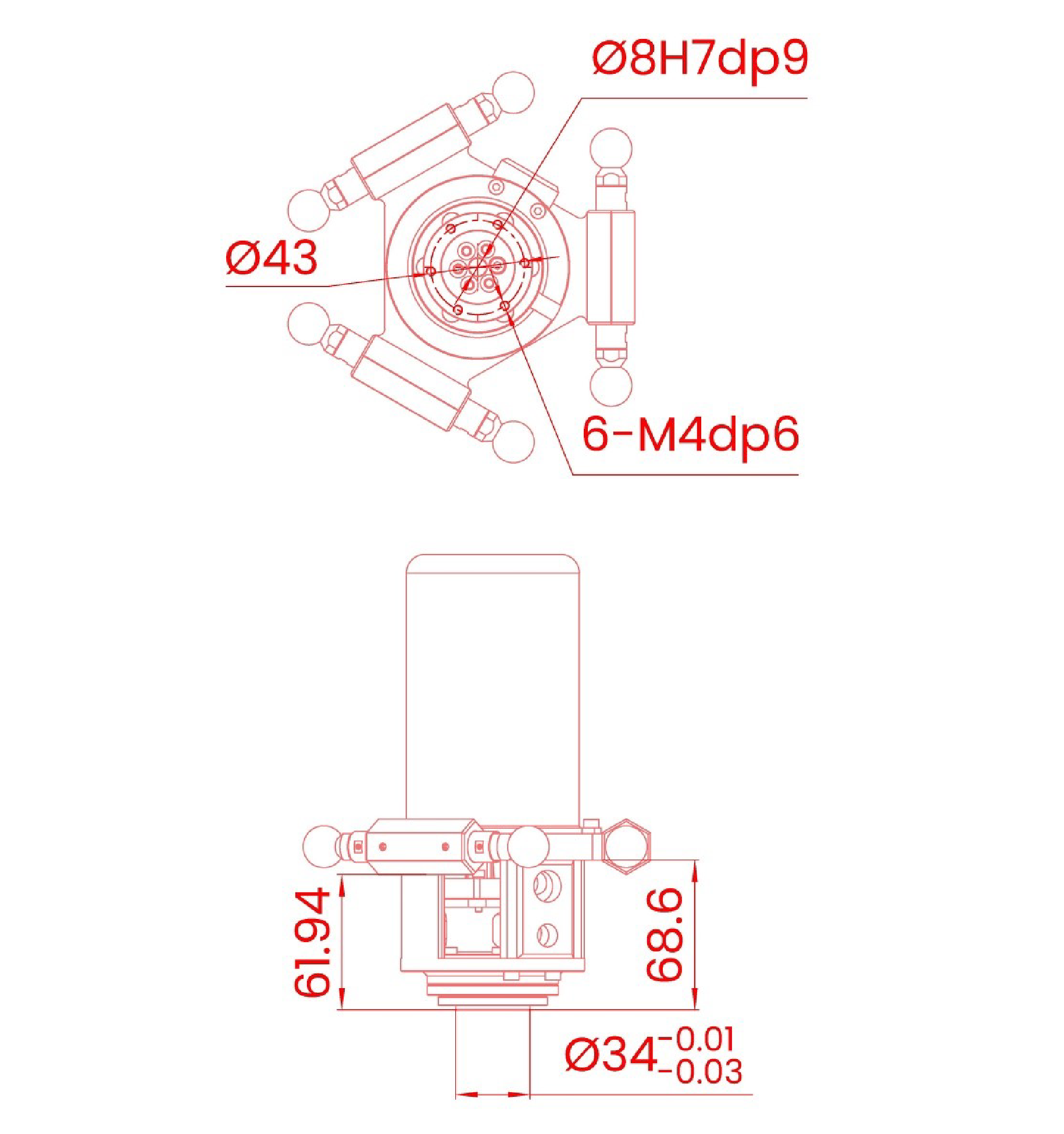
02. Brida (mm)
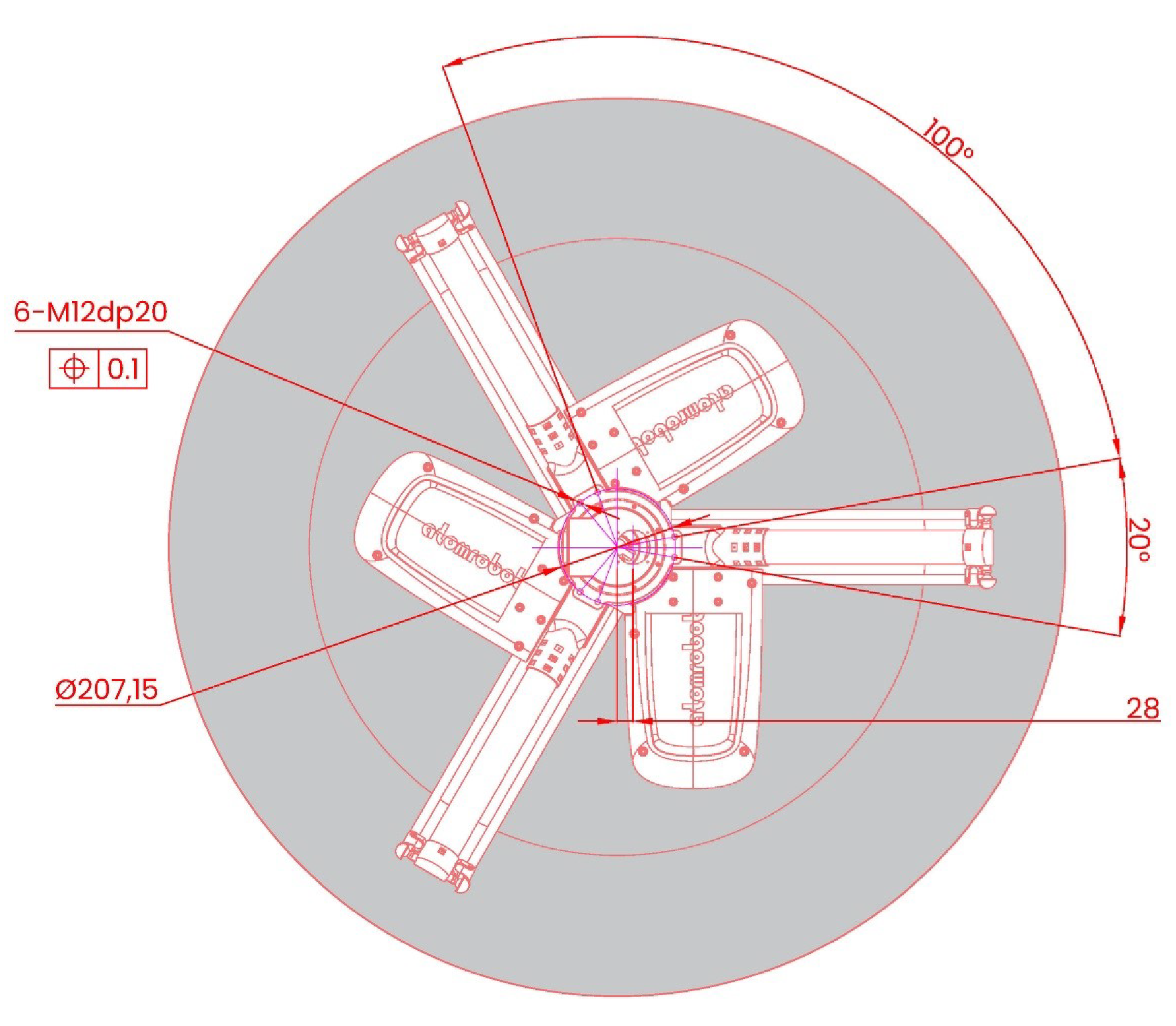
03.Instalación base (mm)
Escribe aquí tu mensaje y envíanoslo